
- MIT a prezentat pe 1 decembrie 2025 un set de tendoane artificiale din hidrogel pentru roboți acționați de mușchi crescut în laborator
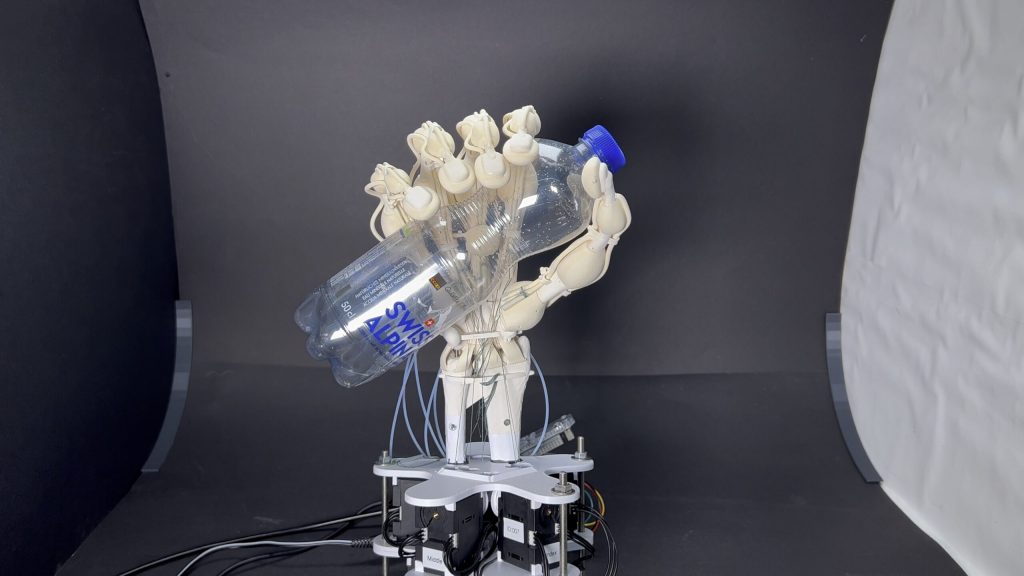
- Într-un clește robotic, „unitatea mușchi–tendon” a închis de ~3 ori mai repede și a prins cu o forță de ~30× mai mare față de varianta fără tendoane
- Tendoanele rezolvă marea problemă a bio-roboticii: mușchiul e prea moale ca să fie legat direct de piese rigide, așa că se rupe sau irosește forță
- Prototipul a funcționat stabil peste 7.000 de contracții și a crescut raportul putere/greutate cu circa 11×
- Echipa condusă de Ritu Raman vede tendoanele ca piese modulare pentru multe tipuri de roboți biohibrizi, de la micro-instrumente chirurgicale la roboți autonomi de explorare
Dacă mușchiul ar fi un motor, atunci tendonul e transmisia. Fără el, ai toată puterea în caroserie, dar nu ajunge la roți. Exact asta au rezolvat inginerii MIT într-un studiu publicat pe 1 decembrie 2025 în Advanced Science: au creat tendoane artificiale care fac mușchiul crescut în laborator să-și transmită forța mult mai eficient către un robot.
Ce s-a întâmplat?
Echipa lui Ritu Raman (MIT) a construit un „muscle-tendon unit”: o bucățică de mușchi viu, prinsă la capete de două tendoane din hidrogel – un material gelatinos, elastic, dar surprinzător de rezistent. Apoi a montat ansamblul pe un clește robotic. Când mușchiul se contractă, tendoanele trag, iar cleștele se închide rapid și puternic.
Cine este implicat?
Cercetarea e semnată de MIT, cu aport major din două direcții: laboratorul de bio-robotică al lui Ritu Raman și grupul lui Xuanhe Zhao, specializat în hidrogeluri „tough” – genul de gel care se întinde ca o gumă, dar nu se rupe ca o gumă.
Bio-robotica avea mușchi, dar nu avea „cablajul” corect

Roboții biohibrizi sunt o categorie ciudat de fascinantă: schelet sintetic + mușchi viu crescut în laborator = un robot care se mișcă cu actuatoare naturale. De ce să te complici cu asta? Pentru că mușchiul e extrem de bun la scară mică, acolo unde motoarele clasice încep să devină greoaie sau imposibil de miniaturizat. Plus că mușchiul:
- poate deveni mai puternic prin „antrenament”;
- se poate repara singur dacă e rănit.
Dar aici apărea blocajul: majoritatea bio-roboților lega mușchiul direct de piese rigide. Imaginează-ți că încerci să tragi o ușă metalică grea cu un elastic moale. Elasticul nu împinge ușa – se întinde, se tocește, eventual se rupe. Asta se întâmpla și cu mușchiul: mult din el era folosit doar ca să stea prins, nu ca să facă treabă.
Un tendon din hidrogel: moale cât trebuie, tare cât trebuie
Corpul uman a rezolvat de mult conflictul „moale vs rigid”: tendonul e materialul intermediar care preia forța mușchiului și o livrează osului fără să rupă nimic. MIT a replicat ideea cu hidrogel.
Echipa a calculat matematic ce rigiditate ar trebui să aibă tendoanele ca să obțină mișcarea dorită. Apoi a formulat un hidrogel exact cu acea „tărie” și l-a transformat în cabluri subțiri, ca niște benzi elastice foarte rezistente. Avantajul materialului: aderă bine atât la țesutul viu, cât și la structuri artificiale – deci legătura nu cedează când mușchiul trage.
Cleștele cu mușchi: de 30 de ori mai multă forță pe aceeași rețetă
Testul a fost simplu și convingător. Clește robotic miniatural, acționat fie:
- doar de mușchi prins direct, fie
- de mușchi + tendoane artificiale.
Rezultatul: varianta cu tendoane a fost:
- de aproximativ 3 ori mai rapidă;
- de circa 30 de ori mai puternică la prindere;
- stabilă pe peste 7.000 de contracții repetate;
- cu un raport putere/greutate crescut cu aproximativ 11×.
Cu alte cuvinte, aceeași cantitate de mușchi a început să „tragă ca un campion”, pentru că avea, în sfârșit, un mod inteligent de a transmite forța.
De ce contează: pasul de la demo de laborator la mașini utile
MIT propune tendoanele ca o piesă modulară – un fel de adaptor universal între mușchi și aproape orice schelet robotic. Asta ar putea accelera apariția unor bio-roboți mai variați și mai practici:
- micro-roboți medicali care ajută la proceduri fine în corp;
- mici exploratori autonomi pentru medii unde oamenii nu pot ajunge;
- sisteme de prindere sau locomoție la scală milimetrică.
Desigur, suntem încă în etapa în care bio-robotica trăiește mai mult în incubator decât în lume reală. Dar acest studiu e genul de pas „infrastructural”: nu doar un experiment cool, ci o componentă de bază care face platforma mai robustă și mai ușor de construit.
Pe scurt: MIT a pus tendoane la mușchii roboților și, ca în viață, când conexiunile sunt bune, rezultatele sar în aer.