- NASA a activat tehnologia Mars Global Localization, care îi permite roverului Perseverance să-și calculeze autonom poziția pe Marte
- Sistemul compară panorame realizate la sol cu hărți orbitale și stabilește locația în circa 2 minute, cu o precizie de ~25 cm
- Până acum, roverul depindea de „visual odometry”, metodă care putea acumula erori de până la 35 m pe trasee lungi
- Algoritmul rulează pe un procesor comercial integrat inițial pentru elicopterul Ingenuity, mult mai rapid decât computerele principale ale roverului
- Rezultatul: mai multă navigație autonomă, distanțe mai mari parcurse zilnic și un model pentru viitoarele misiuni pe Marte și Lună
Roverul Perseverance nu mai trebuie să „sune acasă” ca să afle unde se află. După aproape cinci ani de explorare în craterul Jezero, NASA a activat o tehnologie care îi permite să-și determine singur poziția pe suprafața Planetei Roșii, fără intervenția zilnică a inginerilor de pe Pământ.
Advertisment
Anunțul a fost făcut pe 18 februarie 2026 de către Jet Propulsion Laboratory (JPL), iar noul sistem – numit Mars Global Localization (MGL) – a fost folosit deja în operațiuni reale pe 2 și 16 februarie 2026.
Pe Marte nu există GPS. Așa că NASA a construit unul virtual
Pe Pământ, localizarea este banală: sateliții GPS ne spun în câteva secunde unde suntem. Pe Marte, însă, nu există nicio rețea de sateliți de navigație.
Până acum, Perseverance se baza pe o metodă numită „visual odometry”. Practic, roverul analiza constant imaginile captate de camerele sale și estima cât s-a deplasat, ținând cont inclusiv de alunecarea roților pe terenul nisipos sau stâncos.
![]()
Problema? Erorile mici se acumulează. Pe distanțe lungi, roverul putea ajunge să fie „nesigur” de poziția sa cu până la 35 de metri. Când incertitudinea devenea prea mare, sistemul de siguranță îl făcea să oprească și să aștepte confirmare de pe Pământ.
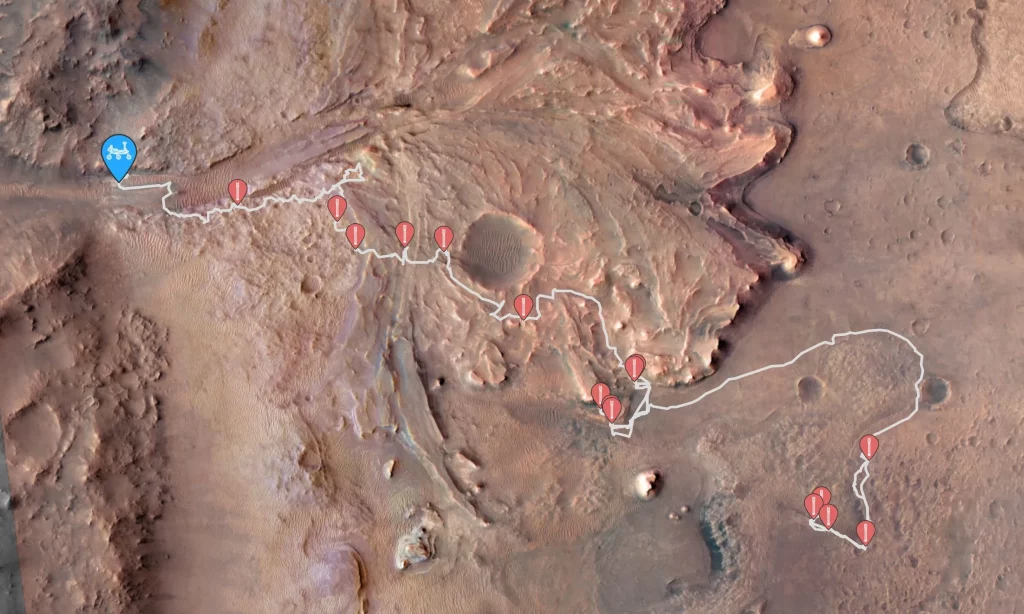
Cu Mars Global Localization, lucrurile se schimbă radical. Roverul face o panoramă 360° cu camerele de navigație, apoi un algoritm compară detaliile terenului cu imagini orbitale de înaltă rezoluție obținute de la sonda Mars Reconnaissance Orbiter. În aproximativ două minute, sistemul identifică poziția roverului cu o precizie de aproximativ 25 de centimetri.
Este, în esență, un „GPS marțian” construit din imagini și algoritmi.
De la „cred că sunt aici” la „știu exact unde sunt”
Această diferență poate părea subtilă, dar pentru operațiuni robotice autonome este esențială.
Perseverance are deja un sistem avansat de navigație autonomă (AutoNav), care îi permite să evite obstacolele și să își ajusteze traseul în timp real. Totuși, limita practică a autonomiei era tocmai incertitudinea poziției.
Acum, roverul poate:
- să se oprească,
- să-și verifice singur poziția cu precizie,
- și să continue traseul planificat fără să aștepte instrucțiuni suplimentare.
În termeni operaționali, asta înseamnă mai mult teren parcurs într-o singură „zi marțiană” și mai mult timp dedicat activităților științifice – analiză de roci, foraje și pregătirea probelor care ar putea fi aduse pe Pământ într-o viitoare misiune.
Procesorul de smartphone care a schimbat jocul
Un detaliu aproape ironic: tehnologia care face posibil acest salt nu provine dintr-un supercomputer spațial ultramodern, ci dintr-un procesor comercial, similar celor folosite în smartphone-uri din anii 2010.
Acest procesor se află în Helicopter Base Station (HBS) – modulul instalat pe rover pentru a comunica cu elicopterul Ingenuity.
HBS rulează de peste 100 de ori mai rapid decât computerele principale ale roverului, care sunt construite pe o arhitectură robustă, dar veche, proiectată să reziste la radiațiile intense de pe Marte.
Folosirea unui procesor comercial în spațiu a fost un risc calculat. Ingenuity, gândit inițial pentru doar câteva zboruri demonstrative, a ajuns să efectueze 72 de zboruri. Iar acum, infrastructura creată pentru el oferă roverului o nouă capacitate strategică.
Pentru a garanta fiabilitatea, echipa JPL a introdus verificări multiple („sanity checks”) și a identificat porțiuni minuscule de memorie afectate de radiații, izolându-le pentru a preveni erori.
Ce înseamnă autonomia reală pentru explorarea spațială
Această actualizare nu este doar un upgrade software. Este un pas spre o nouă generație de explorare robotică autonomă.
Pe Marte, semnalul radio poate întârzia între 4 și 24 de minute într-un singur sens. Asta înseamnă că intervenția în timp real este imposibilă. Cu cât roverele pot lua mai multe decizii singure – inclusiv să știe exact unde se află – cu atât misiunile devin mai eficiente.
NASA indică deja că soluții similare ar putea fi esențiale pentru viitoarele misiuni pe Lună, unde condițiile de iluminare și temperaturile extreme fac localizarea precisă și mai dificilă.
Într-un fel, Perseverance trece de la statutul de „robot ghidat de la distanță” la cel de explorator semi-autonom. Nu doar că evită obstacolele, dar știe exact unde se află când le evită.
Iar pe o planetă fără indicatoare, fără drumuri și fără GPS, asta face toată diferența.
Citește și
- Apple stabilește evenimentul „special Apple Experience” pe 4 martie 2026 — ce gadgeturi și surprize ar putea fi anunțate
- Cercetători spanioli au dezvoltat un sistem de vedere artificială inspirat din animale. Tehnologia „event-based” promite reacții mai rapide și consum redus de energie pentru roboți și drone
- Nvidia amână RTX 50 Super și posibil RTX 60. Gamingul pierde teren în fața boom-ului AI
Partenerii noștri